
Things to know about using multiple cameras on Jetson Nano
The Nvidia Jetson series is known for its extraordinary performance in artificial intelligence with a small form factor. Since the Jetson TX1/TX2 could be too expensive to become popular among hobbyists, the lower-end cost-effective Jetson Nano was introduced in April 2019 for only $99, and it immediately becomes a huge competitor to another maker-favorite platform, the Raspberry Pi.
The Jetson Nano outperforms the RPi a lot, especially in camera applications where more computing power is needed, such as:
- Drones
- High-level robot vision
- Self-driving cars
- Neuron network
- Movement tracking
- Machine learning
- Computer vision
- Artificial intelligence

It’s even designed with the Raspberry Pi style 40 GPIO pins and MIPI CSI-2 camera connector to be compatible with existing accessories from the Raspberry Pi ecosystem, such as Pi camera modules and Pi HATs. As it’s designed like a Raspberry Pi, it’s hard to connect several cameras to the Jetson Nano board. However, that’s not a problem for Arducam, because we have already solved it on the Raspberry Pi platform, and those solutions can also be applied to the Jetson Nano.
3 multi camera solutions by Arducam
Arducam is dedicated to embedded and IoT camera solutions for single-board computers with our HD camera modules and camera adapters. We are advanced in multi-camera solutions on Raspberry Pi and can easily bring all those features to the Jetson Nano platform. Currently, we offer three methods to connect more than 1 camera to a single Jetson Nano, respectively multi-camera adapter board for sequential activating of 4 camera modules, stereo camera HAT for sync dual camera vision, and USB 3.0 camera shield for USB multi-camera solution.
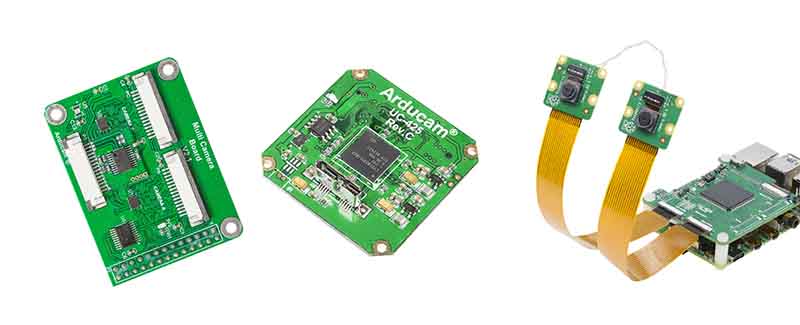
Arducam multiplexer: the 4-in-1 adapter board for Jetson Nano

The multi-camera adapter board, also known as the camera multiplexer, can connect up to 4 MIPI CSI cameras to a single MIPI camera port on a Raspberry pi or Jetson Nano. The only issue is that it is TDM based, so only one camera can be activated at a time, and the adapter will switch between these cameras in a fast way with the help of software, and makes it like four cameras are working at the same time. It is suitable for the systems where simultaneous camera streaming is not required and only still image analysis is needed.
The USB3.0 Camera Shield
Another high-speed interface on Jetson Nano is the USB 3.0 port, which can offer 5Gbps bandwidth equivalent to 4GByte/s. Arducam has a USB 3.0 camera shield solution that can be also used on the Jetson Nano. You can connect multiple USB3 cameras to the Jetson Nano, as long as the total USB bandwidth is within the 4GByte/s limitation. Synchronization between the cameras requires the external trigger input features of the global shutter cameras.
Click here to learn more about the Arducam USB camera shield.
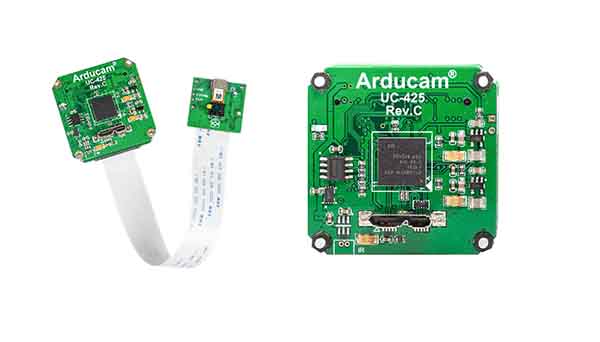
The near future: stereo camera HAT

We just released a revolutionary stereo camera HAT for Raspberry pi, which allows you to connect two cameras working simultaneously to a single MIPI CSI-2 port on a Raspberry Pi. Most importantly, these two cameras are fully synchronized. Since the Jetson Nano uses the same camera connector as the RPi, it’s feasible for us to bring that to this platform. Arducam now is working to port this stereo camera HAT onto the Jetson Nano.
Jetson Nano + Arducam – Do more with multi cameras
The Jetson series is introduced to “automate everything” with its GPU power and AI performance, and they also released a project-ready DIY autonomous robot Kit called JetBot to showcase what the Jetson Nano is capable of. However, we think you can do much more with software from the community and multi-camera solutions from Arducam.
Let’s take the autonomous robot car as an example. Now you can use CUDA programming (a computing platform and API by Nvidia) and Robotic Operating System (ROS, where AI methods and algorithms are integrated) on the Jetson Nano. With our stereo camera HAT, you can add both front and rear view cameras to the Jetson Nano based robot or take advantages of the stereo vision, and it could be useful when you are in an industrywise project that requires simultaneous localization and mapping (SLAM) for better navigation or even augmented reality.


Will Stereo camera HAT work simultaneously? Simultaneous streaming is required. How can i connect multiple cameras with continuous streaming for all cameras.