
About Arducam Multi-Camera Solution
Arducam Expands a single CSI connector into several to connect and sync more MIPI cameras to your embedded systems like Raspberry Pi, NVIDIA Jetson Nano/Xavier NX, MCU, and more.
Best Multi-camera Solutions for Embedded Cameras
From camera-multiplexing to Quad-camera synchronization.

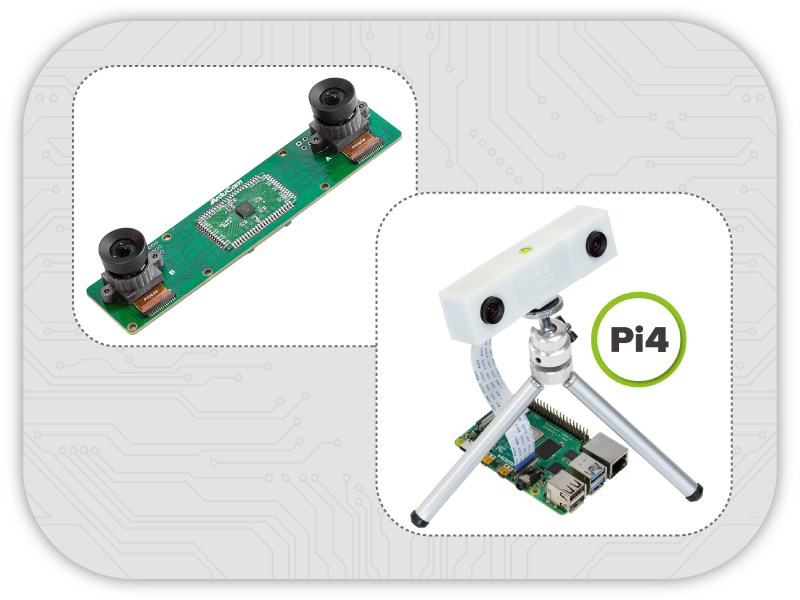
Stereo Camera Series
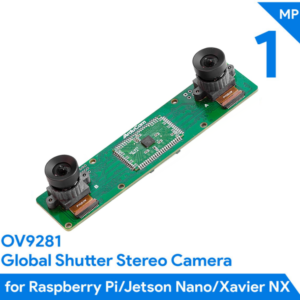
- Stereoscopic vision cameras inspired by RPI V1/V2/HQ and Global Shutter sensors.
- Give the robots depth perception skills, which make artificial machines and systems develop an understanding of their environment.
- Various M12/CS/C mount lens options.
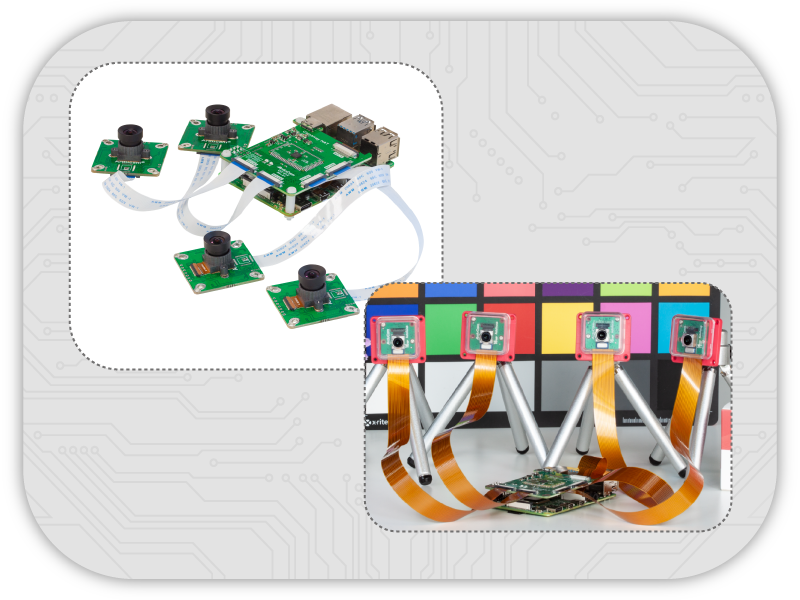
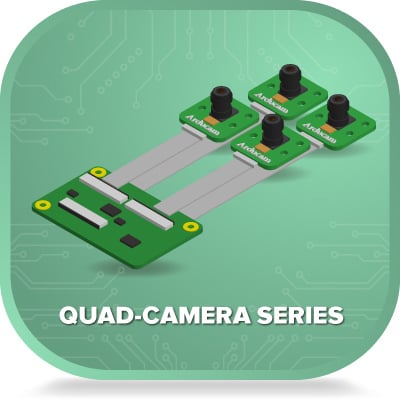
Quad-Camera Series
- 4-channel Camera kit built with RPI V2/HQ/V3 and Mono/Color global shutter cameras.
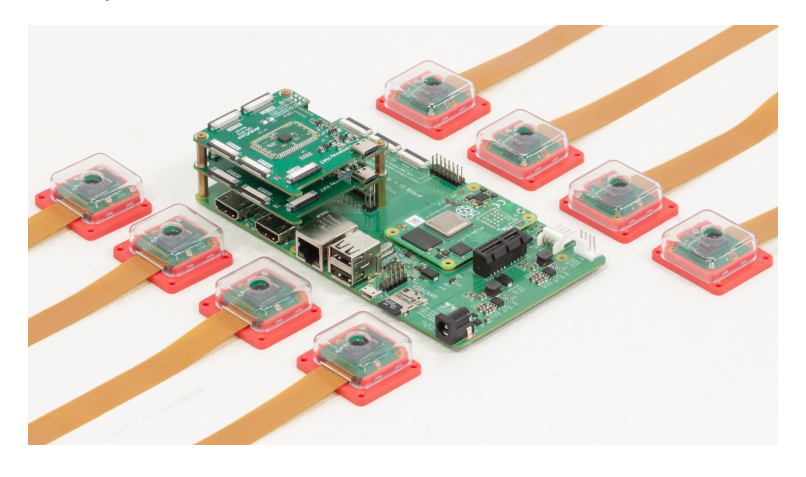
- Allows up to 4 synchronized MIPI Camera modules to be interfaced to a Single MIPI CSI-2 Slot.
- Synchronized at frame-level. Supported on prevailing single-board computers like Raspberry Pi, NVIDIA Jetson, etc.
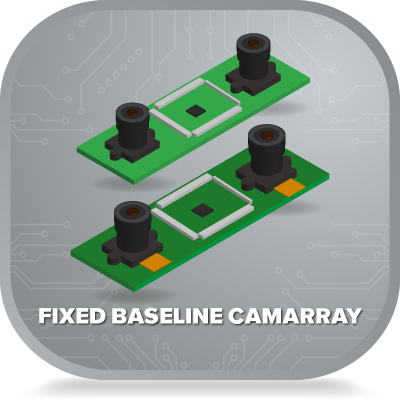
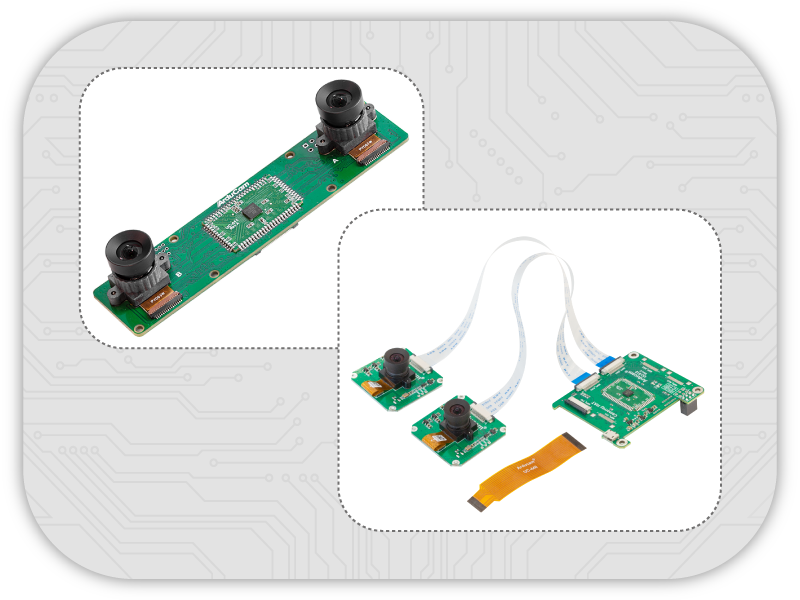
Fixed Baseline CamArray
- Integrates two sensors on a single board, with clock and I2C signal sharing together
- Synchronized at frame and hardware level.
- Mainly developed for Dual-Camera Stereo Synchronized.
- Supported on prevailing single-board computers like Raspberry Pi, NVIDIA Jetson, etc.
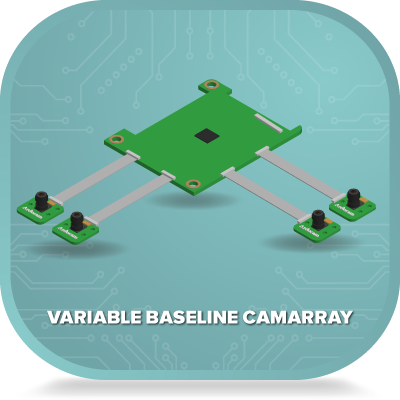
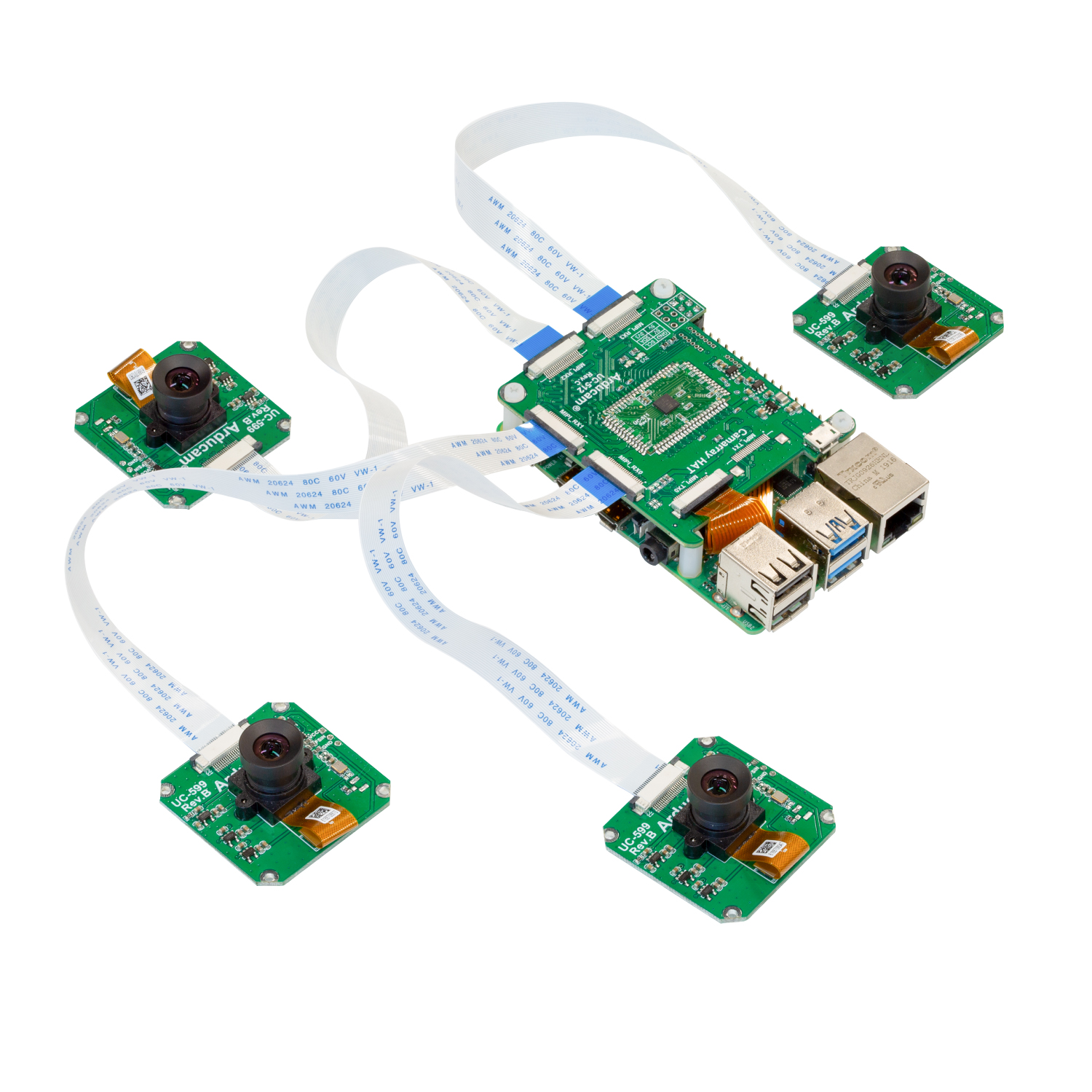
Variable Baseline CamArray
- Comes with an Arducam CamArray HAT, which synchronizes the clock and I2C single via CamArray HAT.
- More flexible and convenient compared with the Fixed-Baseline version.
- Supported on prevailing single-board computers like Raspberry Pi, NVIDIA Jetson, etc.
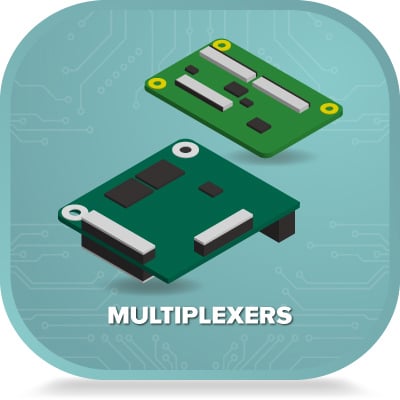
Multi-Camera Adapter Board
- Camera multiplexer boards v2.2 support 1~4 cameras in sequence for still images.
- Compatible with V1/V2/HQ/V3 and any other sensors.
- Works only with Raspberry Pi model.
- Tiny Size Multi-Camera board v2 for Raspberry Pi zero.
Customization
- Support for any sensors, up to 8 Cameras.
- Well-tuned ISP effects for Many Platforms.
- Custom Lens and filter options.
- Tailored module form factor.
- Customizable cable length, shape, and pinout.
- Camera housing design using CNC/Injection molding.
Multiple Camera Module 3
Sensor Extension Cable
The 2nd Gen.Arduchip Stereo Camera Solution available in 4 styles and customization
Arducam’s breakthrough in simultaneously connecting more than one camera on regular Pi/NVIDIA Jetson boards started in 2019 – when the Arducam stereo camera HAT is released to connect two cameras and synchronize them at clock level by I2C broadcasting and oscillator sharing.
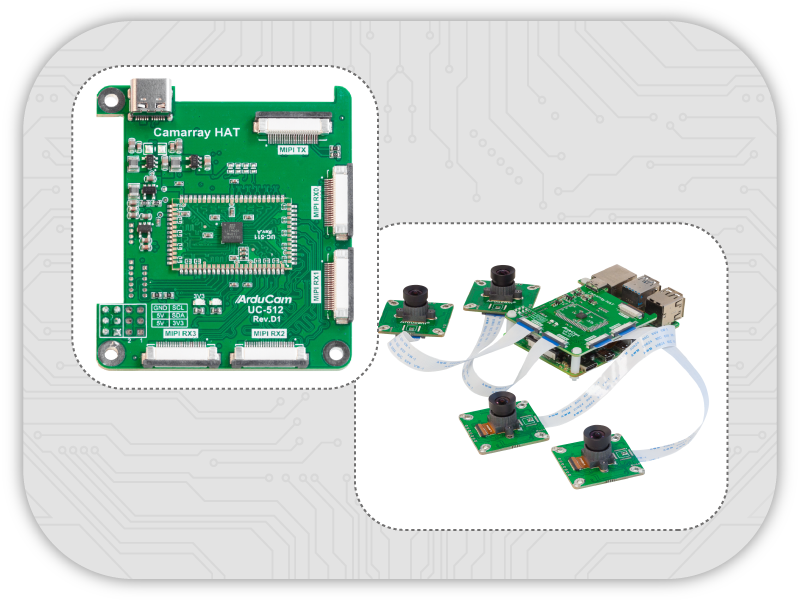
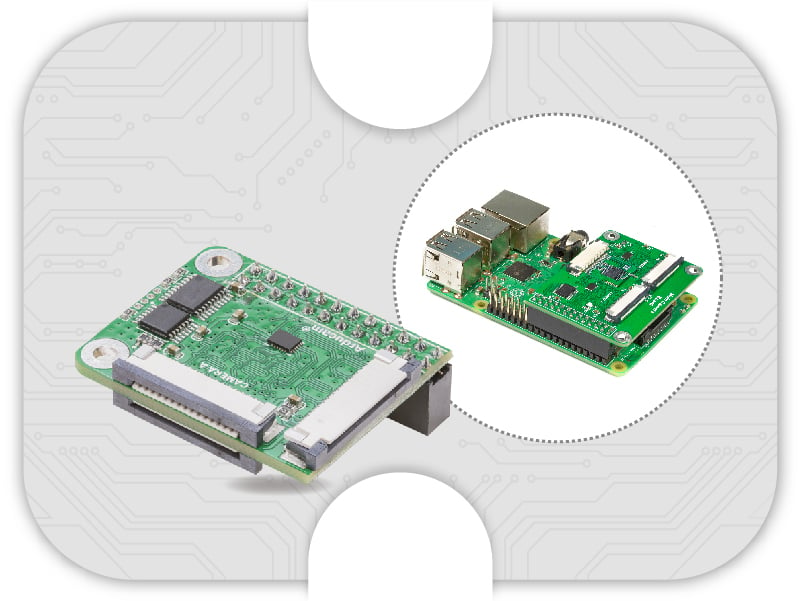
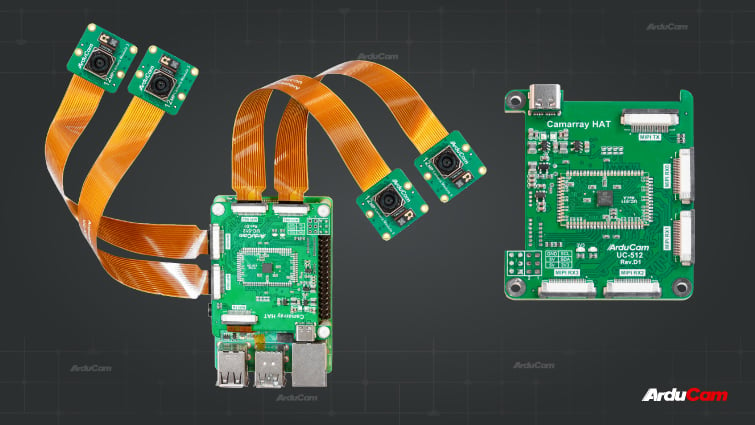
The Camarray HAT is the second generation of the Arducam multi-camera HAT solution. It supports the latest RPi 12MP IMX708 V3 camera. Besides, you can choose stereo-camera and quad-camera HAT variations according to your demand for sensors and applications. It now also supports Global Shutter cameras like OV9281/OV9782/OV2311 for machine vision.



Support Raspberry Pi, Jetson Nano/Xavier NX, and more
As long as the MIPI camera module already works on those popular embedded systems. Arducam Camarray makes multiple of them possible.
√ libcamera
Support latest Raspberry Pi Bullseye OS and libcamera apps on V1, V2, HQ and V3 camera on the Raspberry Pi. Also includes Arducam IMX519, 64MP.
√ NVARGUS
Support native nvarguscamerasrc commands with IMX219 and IMX477 camera Modules on Jetson Nano and Jetson Xavier NX. Also with 16MP IMX519.
√ V4L2
Support Arducam V4L2 camera drivers that make more image sensors – such as OV9281 and OV2311 – possible for the Raspberry Pi and Jetson platforms.
More Connectors, More Possibilities
Arducam Camarray HAT solution allows you to connect more than one camera to a single MIPI CSI-2 camera interface. For example, it’s now possible to connect and sync up to 4 camera modules on a standard Raspberry Pi.
If you have more MIPI interface available on your processing board, the Arducam Camarray solutions are able to bring you even more possibilities to interface multiple cameras. Let’s say your Jetson carrier board comes with 2 MIPI CSI connectors – we can quadruplex each of them and help interface up to 8 cameras on a standard Jetson carrier board and Raspberry Pi Compute Module.
The Arducam Community got your back
Here at Arducam, we are trying our best to provide the most complete support with the help of our community. You can read about our documentations about the Camarray solution on our website, and exchange your ideas on our forum.
If you’ve encountered an issues that are really urgent or difficult to handle, you can always contact Arducam specialist and reach out to us at [email protected].
Documentations
Documentations like quick start guides and datasheets are available.
Forum
Join the discussion in the Arducam forum to receive voices from us and other users.
Technical specialist
Our camera specialist can help setup a remote debug to narrow them down.
Give and Take
While the computing power of the embedded system remains the same, we have some compromises to make when getting more cameras running on more interfaces.
Give – What are the limits we have to live with
Limited resolution and framerates with multiple cameras connected via a single CSI connector.
Those embedded systems come with limited camera interfaces for a reason – the system itself has a limited computing power to process the camera work. In other words, the total bandwidth allocated to the camera feed is limited. Therefore, more cameras require fewer frame rates and lower resolutions to work.
Take – What are the limits we can break
You get to view and utilize the video feed from more cameras.
The Raspberry Pi 4, for example, only offers a single CSI camera connector. Admittedly, the Raspberry Pi may not be powerful enough to process multiple cameras simultaneously, but that should not exclude us from exploring its possibilities. With Arducam Camarray solutions, we help you expand the physical connectivities so you can build more and better projects.
Important Note on the Arducam Camarray HAT:
The Camarray HAT is not sold alone for the following reasons:
- Most of the cameras on the market are not designed for synched stereo uses. We’ve modified our camera modules specifically for the Camarry HAT. Your own V1, V2 or HQ camera modules won’t directly work with it.
- The Camarray HAT requires different firmware for different Image sensors that are not natively working with your embedded systems. Your own OV9281 and OV7251 camera modules won’t directly work with it, and they are not easily interchangeable.
Customization is required if you have extra requirements as the following:
- You need the camera module to run on other Video Modes and Frame Rates.
- You need to trigger the camera with an External Hardware trigger.
IMPORTANT NOTE ON THE IMX477 MIPI LANES:
Our IMX477 camera module support 4-lane in hardware, but the 4-lane camera driver requires extra customization. Here is why:
- Standard Raspberry Pi and Jetson Nano/Xavier NX can’t physically support a 4-lane connection (both of them only have 2-lane CSI connectors). Only the Raspberry Pi Compute Module and some 3rd party Jetson Carrier Boards come with 4-lane hardware support. Therefore, it’s not a general need.
- Extra works, specifically camera drivers, are required for a 4-lane connection other than the 4-lane physical connector. And the drivers are limited by the performances of the platform itself. For example, 4-lane can’t unlock 4k video on Raspberry Pi because the VideoCore does not currently support it. Jetson Nano is also to some extent limited because of the encoding capabilities. You need to make sure you really need it.
More in the Blogs
Introducing Camarray: Arducam’s New Solution to Multiple Cameras on Embedded Systems and Edge Devices
Preface As one of the leading companies that pioneers in multiple cameras for popular embedded systems, Arducam now releases the new multi-camera solutions – named Camarray – which allows you to connect and sync up to 4 MIPI camera modules on the Raspberry Pi, Jetson Nano, and Jetson Xavier NX or even more platforms. Read […]

Go Panoramic w/ Four IMX708 Cams & Our HAT.
What is it like when you take a panoramic view photo with your cell phone? Hold tight to the phone and move slowly from left to right, and finally see a zigzag edge on the joints …… 🙁 How about the below one? Taken by four IMX708 12MP cameras standing still. Not bad, huh? So, […]

