
The image sensors supports kinds of output formats like Raw RGB Bayer, YUV, JPEG, RGB565, RGB555, RGB444 and etc. In preview mode RGB output is preferred and it can be changed to other format when capture mode. In ArduCAM shield the LCD screen only support RGB565 data format, so when we do preview on the screen, we have to configure the sensors to RGB565 output format. Then the ArduCAM shield will display the image directly from the sensor to LCD screen without intervention of the Arduino board.
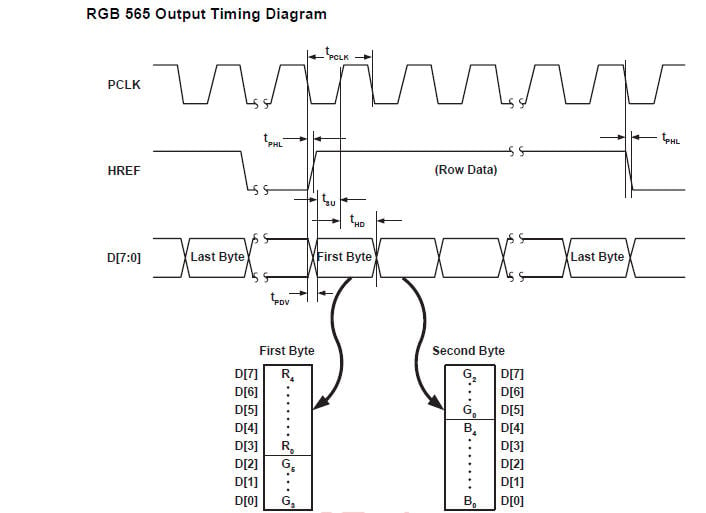
In this case the pixel data from the image sensors is ordered as RGB565 format, which means one pixel is composed by two consecutive bytes, the first byte is R[4:0]G[5:3] and the second byte is G[2:0]B[4:0]. The following picture show the RGB565 output timing and data ordering.
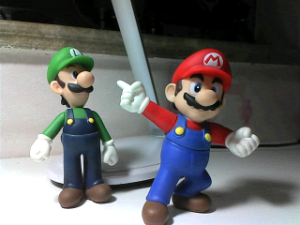
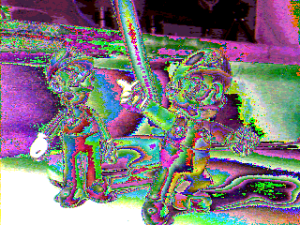
If the two bytes are disordered when saving to file, the color will be wrong. The same shoot but with different byte order the saved image will be different.
Sometimes we don’t know the order of the consecutive bytes at the beginning of the horizon signal HREF(Line_valid). To work around this issue ArduCAM example sketches try to read the first dummy byte from the FIFO to adjust the byte order before saving to a file.
//Write the BMP header
for( i = 0; i < BMPIMAGEOFFSET; i++)
{
char ch = pgm_read_byte(&bmp_header[i]);
buf[k++] = ch;
}
outFile.write(buf,k);
//Read first dummy byte
//myCAM.read_fifo();
k = 0;
//Read 320x240x2 byte from FIFO
//Save as RGB565 bmp format
for(i = 0; i < 240; i++)
for(j = 0; j < 320; j++)
{
VH = myCAM.read_fifo();
VL = myCAM.read_fifo();
buf[k++] = VL;
buf[k++] = VH;
//Write image data to bufer if not full
if(k >= 256)
{
//Write 256 bytes image data to file from buffer
outFile.write(buf,256);
k = 0;
}
}

