
It was impossible to use a non-IMX219 cam like RPI V1.3 on Jetson Nano, but not anymore.
Note: Arducam has upgraded and rebranded the Project Jetvariety. Here is the latest post
Arducam has updated Jetvariety, the project to increase MIPI Cameras for Jetson Nano and Xavier NX, to support NVIDIA Argus API
The Jetson Nano and Jetson Xavier NX only support the IMX219 camera by default, but Arducam wants to support more.The Project Jetvariety of Arducam aims to support all kinds of MIPI camera modules with a single kernel camera driver. It has progressed a lot since its release.To address the new progress, Arducam rebrands the Jetvariety […]
Introducing Project Jetvariety – Increase the Jetson Nano Camera Variety
Today we are proud to introduce the Project Jetvariety (short for Jetson variety), which aims to quickly increase the variety of Jetson Nano cameras with our proprietary general-purpose camera solution.
The Jetson Nano and Xavier NX only have official driver support of the Raspberry Pi Camera Module V2 like IMX219, then followed by the IMX477. Those two would work for the basic camera applications, but what if you are an advanced user and those two can’t meet your needs? Arducam wants to tackle this issue by offering methods to enable MIPI camera modules other than the IMX219 and IMX477 on the Jetson Platforms.
The Project Jetvariety allows any Arducam MIPI camera modules – including the ready-made and the upcoming – to be connected to the high-speed CSI-2 connector on the Jetson Nano. Thanks to our extra hardware and software efforts, it’s not much easier to interface a new camera.


5MP OV5647 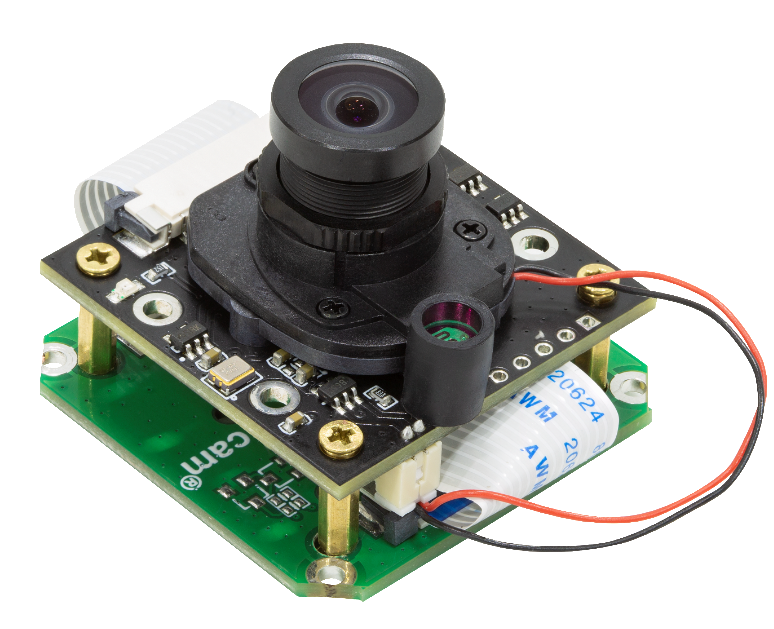

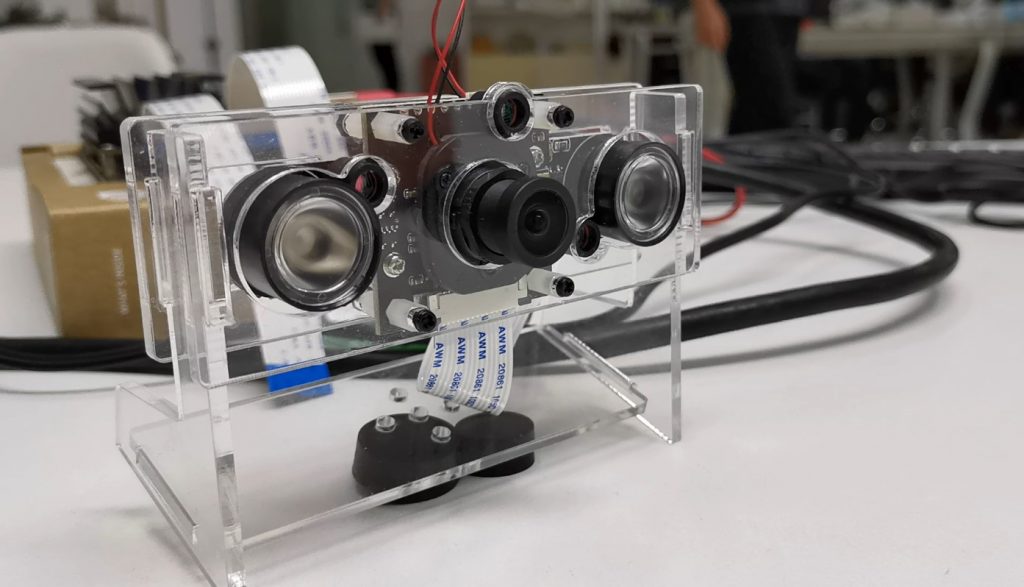
5MP OV5647 w/ IR Cut 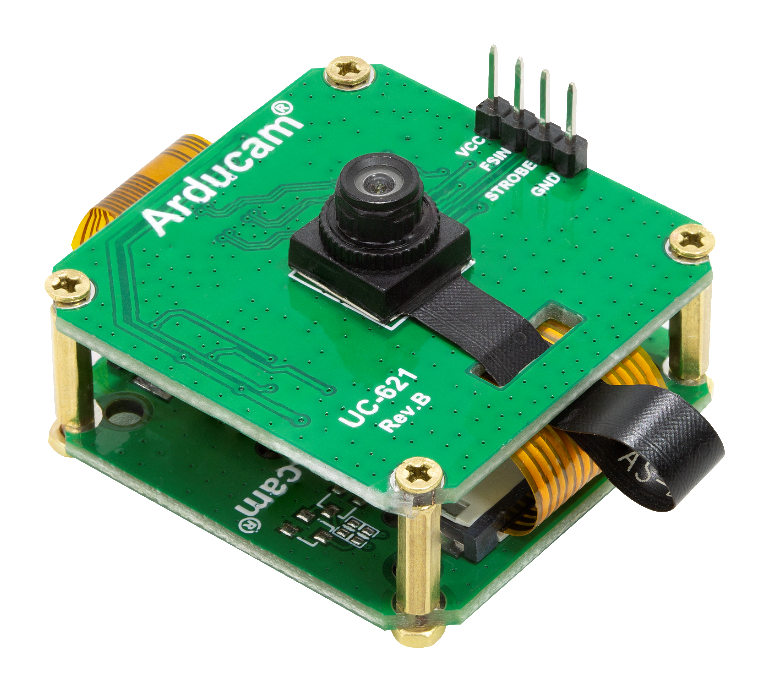

OV2311 2MP Global Shutter 

18MP AR1820 for Nano 

AR0230 HDR w/ Onboard ISP for Nano
It unleashes the vision performance of Jetson Nano by offering more camera choices for much wider applications for industrial, educational, and personal use cases.
Issues with Raspberry Pi Camera V2-like IMX219 or High Quality IMX477 Modules
The first natively supported camera on the Jetson nano is the Sony IMX219 camera from the Raspberry Pi ecosystem, then followed by IMX477. The IMX219 is cheap and good in some of the use cases, while the IMX477 is at a higher-end. So if you are new to Jetson and want to use the camera with the existing on-line opensource code that uses native camera commands like nvgstcapture/nvarguscamera, or nvargus API, etc., just go with those two and you should be fine.
On the other hand, for machine vision, industrial, medical applications you will need a higher resolution and frame rate, or an externally triggered camera without rolling artifacts. If you want to try and test other cameras than the IMX219, it can be painful to switch between cameras, and even a nightmare to develop and debug a camera driver that is not natively supported.
The IMX477 faces a similar issue. Admittedly, it’s a major upgrade to the IMX219,and those high quality cameras from Arducam can satisfy the majority of the customers. However, there are always other sensors people like or have got accustomed to.
Arducam now offers a comprehensive camera solution and support to address this problem, including a kernel camera driver for all cameras. Our solution reduces the complexity to integrate new cameras on the Nano and opens endless possibilities. We want the Project Jetvariety to offer universal compatibility for every camera sensor, as well as universal affordability for every end-user.
Highlights of the Arducam Jetvariety Series
- Support Arducam Breakout Board from 0.3MP ~ 18MP
- Support Monochrome and Color Cameras
- Support Gray,Y10,Y16,RAW8/10 Bayer format (YUV,RGB,JPEG requires extra ISP)
- Support standard V4L2 framework, Video Nodes and Controls (Exposure, Gain and depending on camera parameters)
- Support External Trigger Global Shutter Camera
- Support Dual Camera Synchronization
- Support Arducam Stereo Camera HAT
- Single Line Driver Installation Command
- OpenCV Friendly and Provides Source Code Demonstration
A Non-exhaustive list of Supported Cameras:
Rolling Shutter Cameras:
- 2MP HDR AR0230 with onboard ISP
- 5MP OV5647 Raspberry Pi V1.3 Camera
- 8MP IMX219 Raspberry Pi V2.1 Camera
- 13MP IMX135
- 16MP IMX298
- 18MP AR1820HS
Global Shutter Cameras:
- 0.3MP OV7251
- 1MP OV9281
- 2MP OV2311


Hello I have two questions. 1-can we put the Arducam programmable-focus lens on a global shutter camera module? And 2-in order to synchronize two global shutter cameras, what external trigger and code should we use? Is it an arduino? Can you send me the code? Thank you.
Hello, 1)the programmable-focus lens is not a standalone lens assembly, it’s a part of the sensor module consisting of movable lens, motors and some other parts, so for programmable-focus global shutter cameras, we need to find other global shutter sensor modules with autofocus support. We can’t just put one on the other. 2)We usually uses arduino for the external trigger, and you can contact [email protected] to ask our engineer for help.
Is this a physical add-on, or is it new drivers to help integrate the cameras? Also when and where will this be released?
It’s a solution that includes both the physical add-on and a kernel camera driver. It’s already available for sale from some of our distributors.
Dear Lee. Congratulations on the project. I have happened to obtain a Xavier AGX solution. I am still new to electronics, would it be possible to use your work for my plattform as well?
thx
Hello! I’m new to the whole camera scene and am looking to integrate the raspberry pi high quality camera into the Jetson Nano. Unfortunately, I’m not positive if the support for the V2 “transfers” to the high quality camera, and I would like to know more before I purchase one. How much leg work (if at all) will it take to get the high quality camera to work on the Jetson Nano? Thanks!
We’ve already made it possible to use the high quality camera on the Jetson Nano, but by “use” I mean it’s already able to show images from the camera on the Jetson Nano. We are still refining our solution to add the IMX477 to our Project Jetvariety.
I’ve already purchased several arducam ov5647 cameras before the announcement of project jetvariety. Will I have to purchase an additional attachment, or do I just need to install the drivers?
Thanks!
The project jetvariety consists of 3 parts, the software part (the driver), the adapter part (the Jetvariety adapter board), and the camera module part. If you’ve got the camera modules, you need drivers AND and Jetvariety adapter board to work.
Is it currently possible to purchase the adapter board separate from a camera module?
We do not recommend customers separately purchase the adapter board, because it will only work with Arducam Camera modules and drivers, and will not work with other MIPI cameras. If you are crystal clear about what you’ve already had on hand and known what you want will work, please contact our sales at [email protected]
Dear Lee Jackson,
Diving into a project where I am creating a low-cost video EEG / EMG system for long duration unattended recordings in mice, and the OV9281 looks perfect! From my understanding, I can have my DAQ taking the EEG/EMG signals trigger frames on the camera, and the jetson can encode / save video or other stuff. A couple of questions, will the camera driver you provide play well with gst-4vl2 that nvidia provides in hardware encoding (hevc or h264)?
Super excited to get this project up and running, love your product portfolio, very on the nose.
Hello Matthew, our representative will contact you by email.
Have you measured the power consumption of any of your camera’s or the Raspberry Pi (pro?) camera? Hoping to use this for a dashcam. Additionally, do you have a 4-mipi interface carrier available and is the driver ready from Nvidia?
Dear Lee Jackson,
We are interested in using the OV9281 with the Jetson NX. Is there a Project Jetvariety based solution that would support that use case? We see one module for the Jetson Nano from the product page. Would that module work on the NX as well? There seems to be another dual camera (OV9281) module that is for the NX. We are hoping there might be something similar for a single OV9281. Thanks in advance!
Gillbert
Yes, the OV9281 module with Jetvariety board now can work with Jetson Xavier NX board.
The dual OV9281 and quad OV9281 is also supported now.
https://www.uctronics.com/arducam-1mp-stereo-camera-for-raspberry-pi-nvidia-jetson-nano-and-xavier-nx-dual-ov9281-monochrome-global-shutter-camera-module.html
https://www.uctronics.com/arducam-1mp-2-stereoscopic-camera-bundle-kit-for-raspberry-pi-nvidia-jetson-nano-xavier-nx-two-ov9281-global-shutter-monochrome-camera-modules-and-camarray-stereo-camera-hat.html
https://www.uctronics.com/arducam-1mp-4-quadrascopic-camera-bundle-kit-for-raspberry-pi-nvidia-jetson-nano-xavier-nx-four-ov9281-global-shutter-monochrome-camera-modules-and-camarray-camera-hat.html