


Time of Flight
for All Pis.
Depth sensing for the masses.
You are not just getting another camera module, you are getting an entire solution exclusively built and optimized for Raspberry Pi (30 fps on Pi 4 & CM4.*), a dedicated package deal that will give you a head start for computer vision at the edge, a small yet powerful tool ready to take on some big jobs.
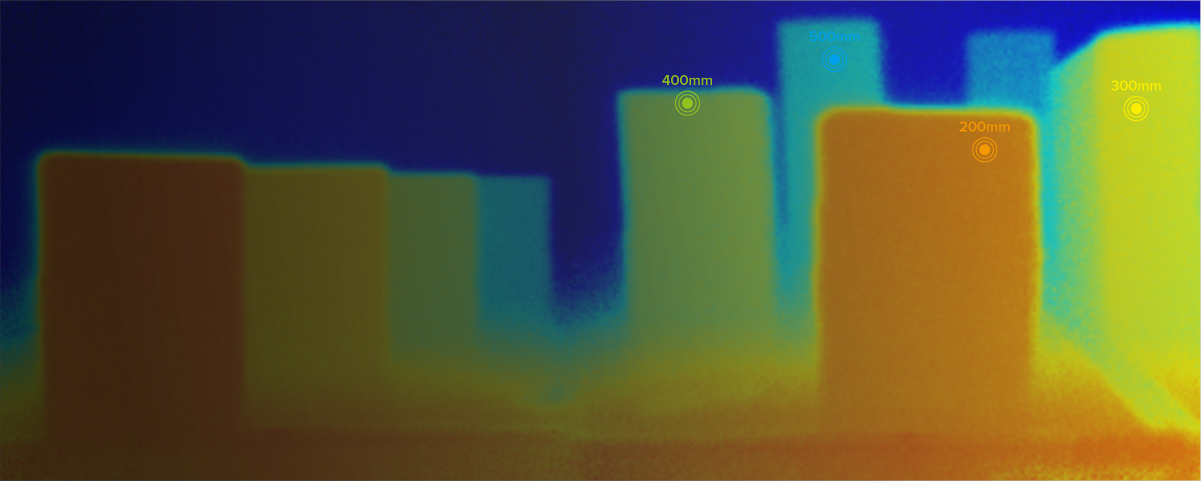
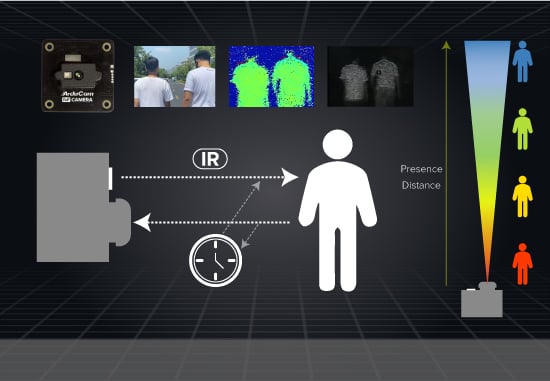
How ToF Works
ToF stands for “Time of Flight”.
A ToF Camera emits modulated lights (CW method) and uses the time it takes for the said lights to be reflected back to measure the distance/depth info of any given object/scene, and you can obtain depth data (X,Y & Z coordinate position) in every pixel.
Light travel is calculated with d=C/2f, where C is the speed of light and f is the modulation frequency.

Making 3D Imaging
Easier and Affordable.
Getting ToF tech affordable is our top priority.
We are not dropping names, we only want you to know that a decent ToF camera starts at $29.99. And it’s not about pumping the specs, it’s about making “Raspberry Pi for industry” more “robust” and “scalable” than ever before.
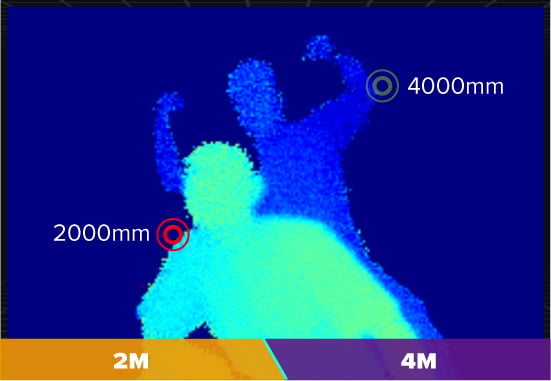
2M or 4M,
With Cable Extension.
The right hit at the sweet spot.
Here’re the facts behind the specs: 4m is a good enough operation range for good enough amount of applications. And if you pair the camera with our cable extension kit, you will have a ToF module with a 4m/2m working range and a 10-meter cable to move around!
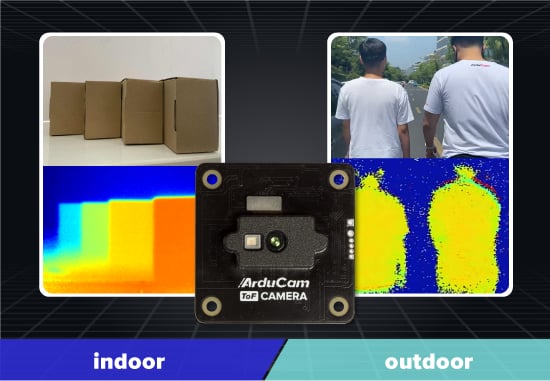
From Indoor
to Outdoor.
Yes, you can use it under sunlight too.
With some trial-and-errors, and through innumerable experiments, we gave the camera a laser (VCSEL) that operates at the 940nm wavelength, which can well suppress interferences from ambient light in outdoor environments. So yes, it’s not just a ToF camera limited to indoor uses.
Ready, Set, Go.
For Any MV Library.
C, C++, or Python? Pick your pick.
The camera can work as a standard V4L2 device and it’s available in all three languages, so you can use it with your preferred machine vision libraries (OpenCV/TensorFlow/etc.) without breaking a sweat.

From 2D to 3D,
It’s Fully Customizable.
More applications will be inspired.
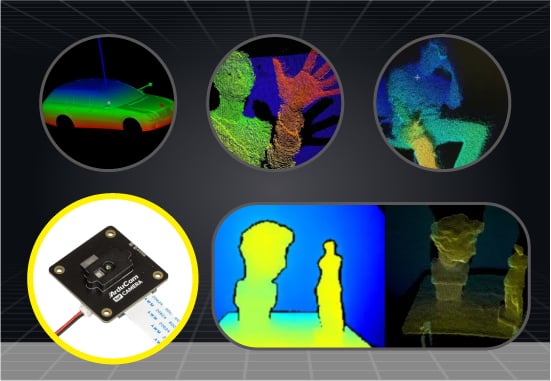
Your “hello world” of depth sensing starts with raw, depth, and amplitude frames. Being able to acquire depth data will produce better/more accurate results for CV algos designed for a wide range of 3D, tracking, recognition, estimation, reconstruction, navigation, localization, and classification tasks.
The camera can also be calibrated with RAW frame data for improved precisions. Please get in touch with us if you want the camera to be customized.
Point Clouds Primed?
ROS Ready?
Easy-Breezy.
In real-time, on your Raspberry Pi.
Mapping, 3D, and photogrammetric (etc.) applications that require point coulds generated from a ToF camera’s captured 3D depth data can be easily achieved on a low-power, RPi-based system, with less than 100 bucks.
Specifications
| Specification | Arducam ToF Camera |
|---|---|
| Price | $29.99 – Kickstarter $50 – MSRP |
| Number of Effective Pixels | 240×180 |
| Image Size | 1/6″ |
| Max. Frame Rate (Sensor) | 120fps |
| Max. Depth Frame Rate (Raspberry Pi) | 30fps, 4-phase |
| Raspberry Pi OS | Bullseye (32-bit/64-bit) 01/28/22 or later releases |
| TDP | 3.5W Power supply for Pi should be at least 5V/4A |
| Supported Platforms | Pi 2/3/CM3/4B Zero W/Zero 2 W/CM4 |
| Modulation Frequency | 75MHz/37.5MHz |
| Viewing Angle | 70° Diagonal |
| Measurement Distance | Far Mode: 4m Near Mode: 2m |
| Light Source | 940nm VCSEL illuminator |
| Board Size | 38mm x 38mm |
| Interface | MIPI (2-Lane) |
| Output Formats | 4-phases RAW Frame, Depth Frame, Grayscale Amplitude Frame |

Time of Flight Camera for Raspberry Pi
Low-Cost Depth Sensing Solutions
Getting embedded systems ready for the future of computer vision.

VR & AR

Logistics

Automotive

Healthcare

Surveillance

Robotics
Demonstration
What Others Say


FAQs
Is it compatible with all Raspberry Pi models?
Yes, it can work with most Pis. However, with early models, there may be performance drops.
Do I need external light sources?
No, the camera has an onboard laser. (Non-intrusive, safe for the human eye.)
What light source is used?
940nm VCSEL illuminator.
What’s the maximum operating range?
Far Mode: 4m
Near Mode: 2m
What’s the maximum frame rate?
30fps on Raspberry Pi 4 and CM4.
~15fps on Pi Zero 2 W
~10fps on Pi 3B
~5fps on Pi Zero
What’s the maximum accuracy I can get?
Far mode:±2cm,
Near mode: ±4cm
What’s the FoV of the lens?
70° Diagonal.
Can I change the lens for wider FoVs?
No.
Can it surpass 4 meters?
Technically, no. But with our cable extension solution, you can have a 20 m-long cable connection.
Can I use the camera in outdoor environments?
Yes. But with strong reflective surfaces, there will be interferences.
Does the camera support both 32-bit and 64-bit Raspberry Pi OS?
Yes.
Can the camera work with 3rd-party distros?
Yes. We have SDKs available in C, C++, and python.
Can I combine it with Arducam color cameras for Pi?
No. But we may add support in the future.
Can the camera work with Nvidia Jetson boards?
Yes. The camera can work with NVIDIA Jetson Nano / Xavier NX.
