Example with CPP
- There are several steps to get camera data:
create a camera instance.
initialize camera instance.
start the camera.
request a frame.
get frame data
release frame space
stop the camera
example
#include "ArducamTOFCamera.hpp" #include <opencv2/core.hpp> #include <opencv2/imgproc.hpp> #include <opencv2/highgui.hpp> #include <chrono> #include <iostream> // MAX_DISTANCE value modifiable is 2 or 4 #define MAX_DISTANCE 4 using namespace Arducam; void display_fps(void) { static int count = 0; ++count; static std::chrono::high_resolution_clock::time_point time_beg = std::chrono::high_resolution_clock::now(); std::chrono::high_resolution_clock::time_point time_end = std::chrono::high_resolution_clock::now(); std::chrono::duration<double, std::ratio<1, 1>> duration_s = time_end - time_beg; if (duration_s.count() >= 1) { std::cout << "fps:" << count << std::endl; count = 0; time_beg = time_end; } } cv::Mat matRotateClockWise180(cv::Mat src) { if (src.empty()) { std::cerr << "RorateMat src is empty!"; } flip(src, src, 0); flip(src, src, 1); return src; } void getPreview(uint8_t *preview_ptr, float *phase_image_ptr, float *amplitude_image_ptr) { auto len = 240 * 180; for (auto i = 0; i < len; i++) { uint8_t mask = *(amplitude_image_ptr + i) > 30 ? 254 : 0; float depth = ((1 - (*(phase_image_ptr + i) / MAX_DISTANCE)) * 255); uint8_t pixel = depth > 255 ? 255 : depth; *(preview_ptr + i) = pixel & mask; } } cv::Rect seletRect(0, 0, 0, 0); cv::Rect followRect(0, 0, 0, 0); void onMouse(int event, int x, int y, int flags, void *param) { if (x < 4 || x > 251 || y < 4 || y > 251) return; switch (event) { case cv::EVENT_LBUTTONDOWN: break; case cv::EVENT_LBUTTONUP: seletRect.x = x - 4 ? x - 4 : 0; seletRect.y = y - 4 ? y - 4 : 0; seletRect.width = 8; seletRect.height = 8; break; default: followRect.x = x - 4 ? x - 4 : 0; followRect.y = y - 4 ? y - 4 : 0; followRect.width = 8; followRect.height = 8; break; } } int main() { ArducamTOFCamera tof; ArducamFrameBuffer *frame; if (tof.init(Connection::CSI)) { std::cerr << "initialization failed" << std::endl; exit(-1); } if (tof.start(FrameType::DEPTH_FRAME)) { std::cerr << "Failed to start camera" << std::endl; exit(-1); } // Modify the range also to modify the MAX_DISTANCE tof.setControl(ControlID::RANGE, MAX_DISTANCE); CameraInfo tofFormat = tof.getCameraInfo(); float *depth_ptr; float *amplitude_ptr; uint8_t *preview_ptr = new uint8_t[tofFormat.height * tofFormat.width]; cv::namedWindow("preview", cv::WINDOW_AUTOSIZE); cv::setMouseCallback("preview", onMouse); for (;;) { frame = tof.requestFrame(200); if (frame != nullptr) { depth_ptr = (float *)frame->getData(FrameType::DEPTH_FRAME); amplitude_ptr = (float *)frame->getData(FrameType::AMPLITUDE_FRAME); getPreview(preview_ptr, depth_ptr, amplitude_ptr); cv::Mat result_frame(tofFormat.height, tofFormat.width, CV_8U, preview_ptr); cv::Mat depth_frame(tofFormat.height, tofFormat.width, CV_32F, depth_ptr); cv::Mat amplitude_frame(tofFormat.height, tofFormat.width, CV_32F, amplitude_ptr); depth_frame = matRotateClockWise180(depth_frame); result_frame = matRotateClockWise180(result_frame); amplitude_frame = matRotateClockWise180(amplitude_frame); cv::applyColorMap(result_frame, result_frame, cv::COLORMAP_JET); amplitude_frame.convertTo(amplitude_frame, CV_8U, 255.0 / 1024, 0); cv::imshow("amplitude", amplitude_frame); cv::rectangle(result_frame, seletRect, cv::Scalar(0, 0, 0), 2); cv::rectangle(result_frame, followRect, cv::Scalar(255, 255, 255), 1); std::cout << "select Rect distance: " << cv::mean(depth_frame(seletRect)).val[0] << std::endl; cv::imshow("preview", result_frame); if (cv::waitKey(1) == 27) break; display_fps(); } tof.releaseFrame(frame); } if (tof.stop()) exit(-1); return 0; }
Note
For specific function usage details, please refer to the API
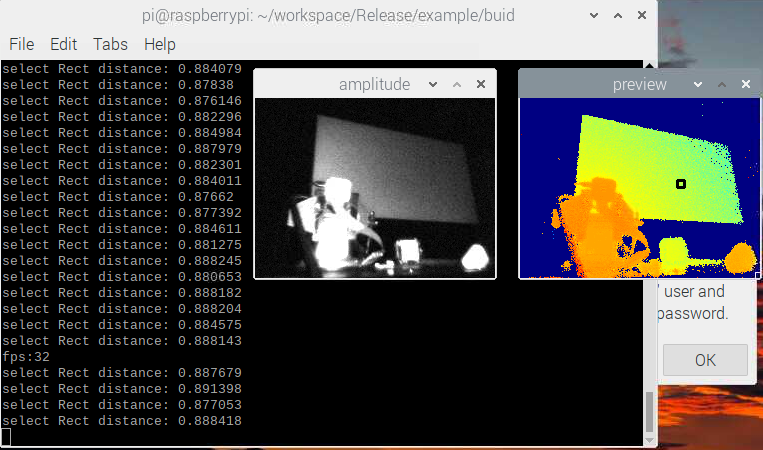
Test Results