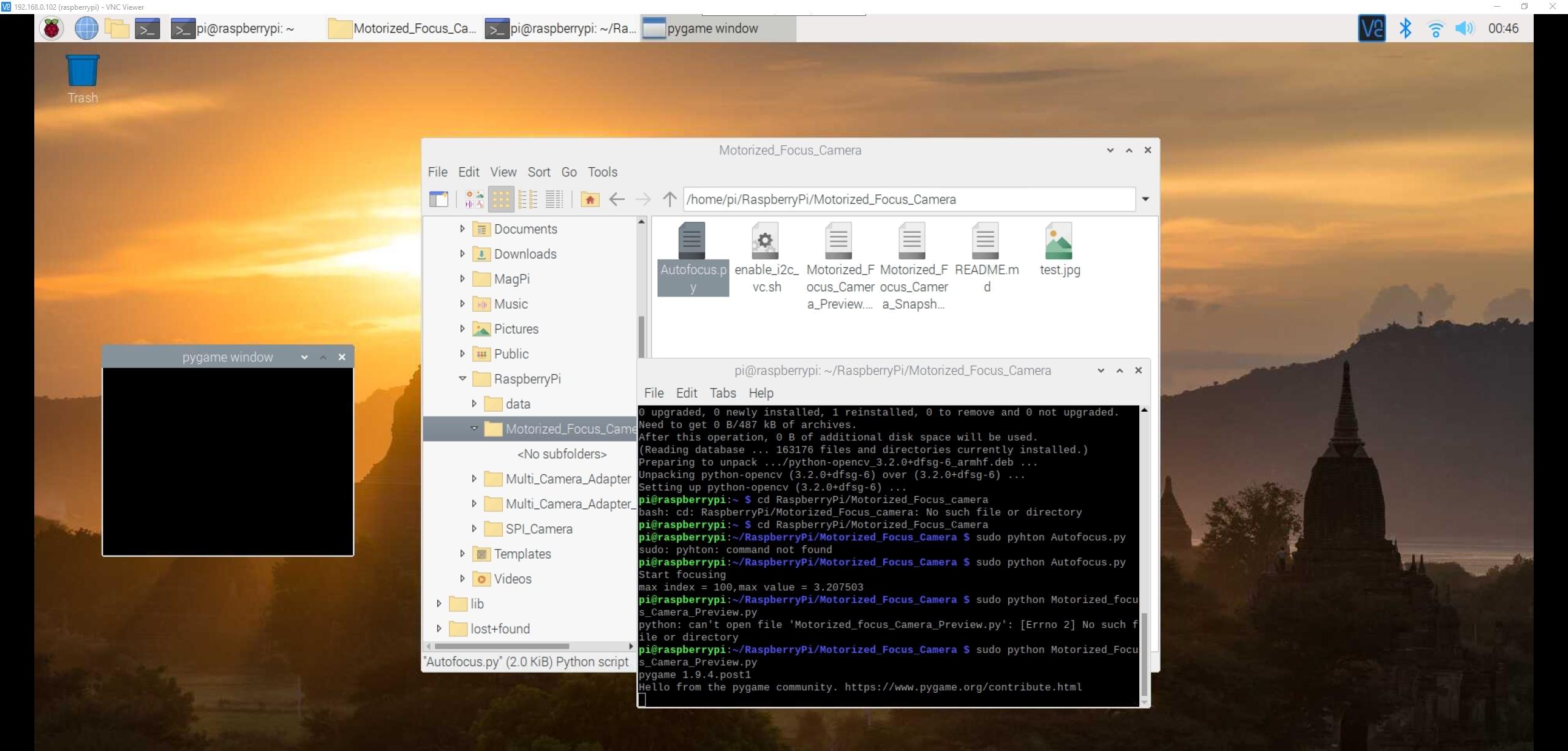
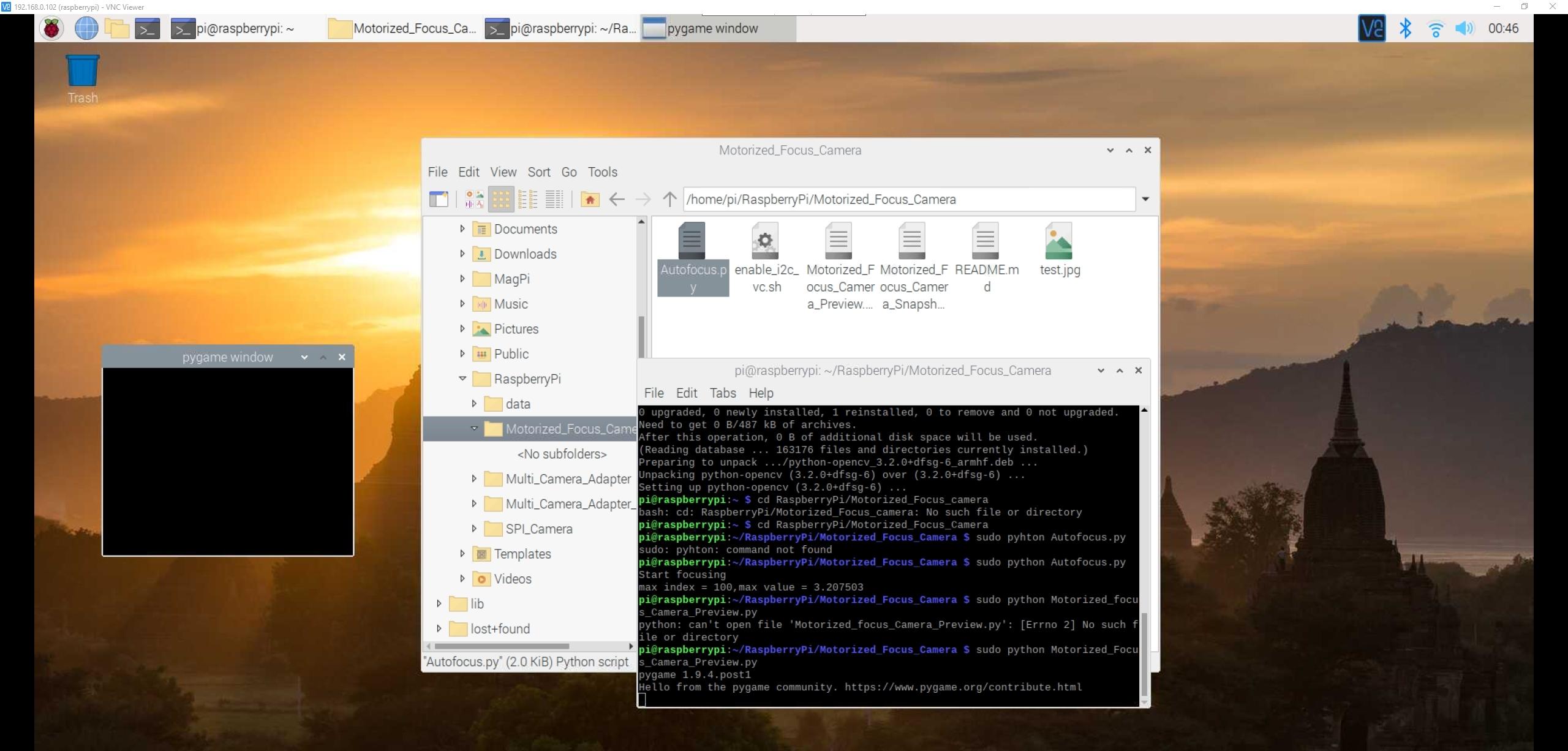
I recently purchased and easily installed the camera to my Raspberry Pi. I updated everything and did “sudo apt-get update”
When I try to run the command I get the following error.
pi@octopi:~ $ cd RaspberryPi/Motorized_Focus_Camera
pi@octopi:~/RaspberryPi/Motorized_Focus_Camera $ sudo python Autofocus.py [sudo] password for pi:
mmal: mmal_vc_port_enable: failed to enable port vc.null_sink:in:0(OPQV): ENOSPC
mmal: mmal_port_enable: failed to enable connected port (vc.null_sink:in:0(OPQV) )0x15cad80 (ENOSPC)
mmal: mmal_connection_enable: output port couldn’t be enabled
Traceback (most recent call last):
File “Autofocus.py”, line 39, in <module>
camera = picamera.PiCamera()
File “/usr/lib/python2.7/dist-packages/picamera/camera.py”, line 433, in ini t
self._init_preview()
File “/usr/lib/python2.7/dist-packages/picamera/camera.py”, line 513, in _init preview
self, self.camera.outputs[self.CAMERA_PREVIEW_PORT])
File “/usr/lib/python2.7/dist-packages/picamera/renderers.py”, line 558, in __ init
self.renderer.inputs[0].connect(source).enable()
File “/usr/lib/python2.7/dist-packages/picamera/mmalobj.py”, line 2212, in ena ble
prefix=“Failed to enable connection”)
File “/usr/lib/python2.7/dist-packages/picamera/exc.py”, line 184, in mmal_che ck
raise PiCameraMMALError(status, prefix)
picamera.exc.PiCameraMMALError: Failed to enable connection: Out of resources
pi@octopi:~/RaspberryPi/Motorized_Focus_Camera $ ^C
pi@octopi:~/RaspberryPi/Motorized_Focus_Camera $ sudo python Motorized_Focus_Cam era_snapshot.py
python: can’t open file ‘Motorized_Focus_Camera_snapshot.py’: [Errno 2] No such file or directory
pi@octopi:~/RaspberryPi/Motorized_Focus_Camera $ Ls
-bash: Ls: command not found
pi@octopi:~/RaspberryPi/Motorized_Focus_Camera $ ls
Autofocus.py Motorized_Focus_Camera_Preview.py README.md
enable_i2c_vc.sh Motorized_Focus_Camera_Snapshot.py
pi@octopi:~/RaspberryPi/Motorized_Focus_Camera $ sudo python Motorized_Focus_Cam era_Snapshot.py
Traceback (most recent call last):
File “Motorized_Focus_Camera_Snapshot.py”, line 6, in <module>
import pygame,sys
ImportError: No module named pygame
pi@octopi:~/RaspberryPi/Motorized_Focus_Camera $ sudo python Motorized_Focus_Cam era_Preview.py
Traceback (most recent call last):
File “Motorized_Focus_Camera_Preview.py”, line 6, in <module>
import pygame,sys
ImportError: No module named pygame
pi@octopi:~/RaspberryPi/Motorized_Focus_Camera $ sudo apt-get install pygame
Reading package lists… Done
Building dependency tree
Reading state information… Done
E: Unable to locate package pygame
pi@octopi:~/RaspberryPi/Motorized_Focus_Camera $ ^C
pi@octopi:~/RaspberryPi/Motorized_Focus_Camera $ import pygame
import-im6.q16: unable to open X server `’ @ error/import.c/ImportImageCommand/3 58.
Q1:mmal: mmal_vc_port_enable: failed to enable port vc.null_sink:in:0(OPQV): ENOSPC
mmal: mmal_port_enable: failed to enable connected port (vc.null_sink:in:0(OPQV) )0x15cad80 (ENOSPC)
mmal: mmal_connection_enable: output port couldn’t be enabled
A1:The raspberypi mmal failed to enable port, It seems the FPC cable is defective. I give you some suggestions:
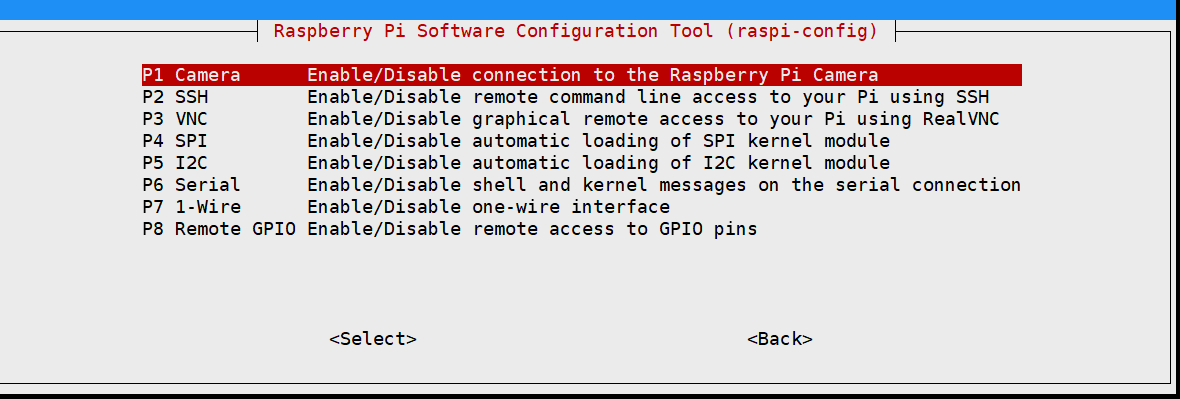
1.Please check if you have enable the camera and i2c0
Please reconnect the FPC cable and use the official raspistill command to test the camera firstly. Just run pi@raspberrypi:~ $ raspistill -t 0 . If normal, you will see the preview on the hdmi screen.
I did what you did and enabled the camera and i2c0, and installed pygame successfully. I am getting this error when running pi@raspberrypi:~ $ raspistill -t 0
pi@octopi:~ $ raspistill -t 0
mmal: mmal_vc_component_enable: failed to enable component: ENOSPC
mmal: camera component couldn’t be enabled
mmal: main: Failed to create camera component
mmal: Failed to run camera app. Please check for firmware updates
It looks like the camera doesn’t even be recognized. Please make sure if the camera can be detected by the pi board first with vcgencmd get_camera command.
Also please upload the hardware setup photos for diagnose.
This is the error I still get running the pi@raspberrypi:~ $ raspistill -t 0 command.
mmal: mmal_vc_component_enable: failed to enable component: ENOSPC
mmal: camera component couldn’t be enabled
mmal: main: Failed to create camera component
mmal: Failed to run camera app. Please check for firmware updates
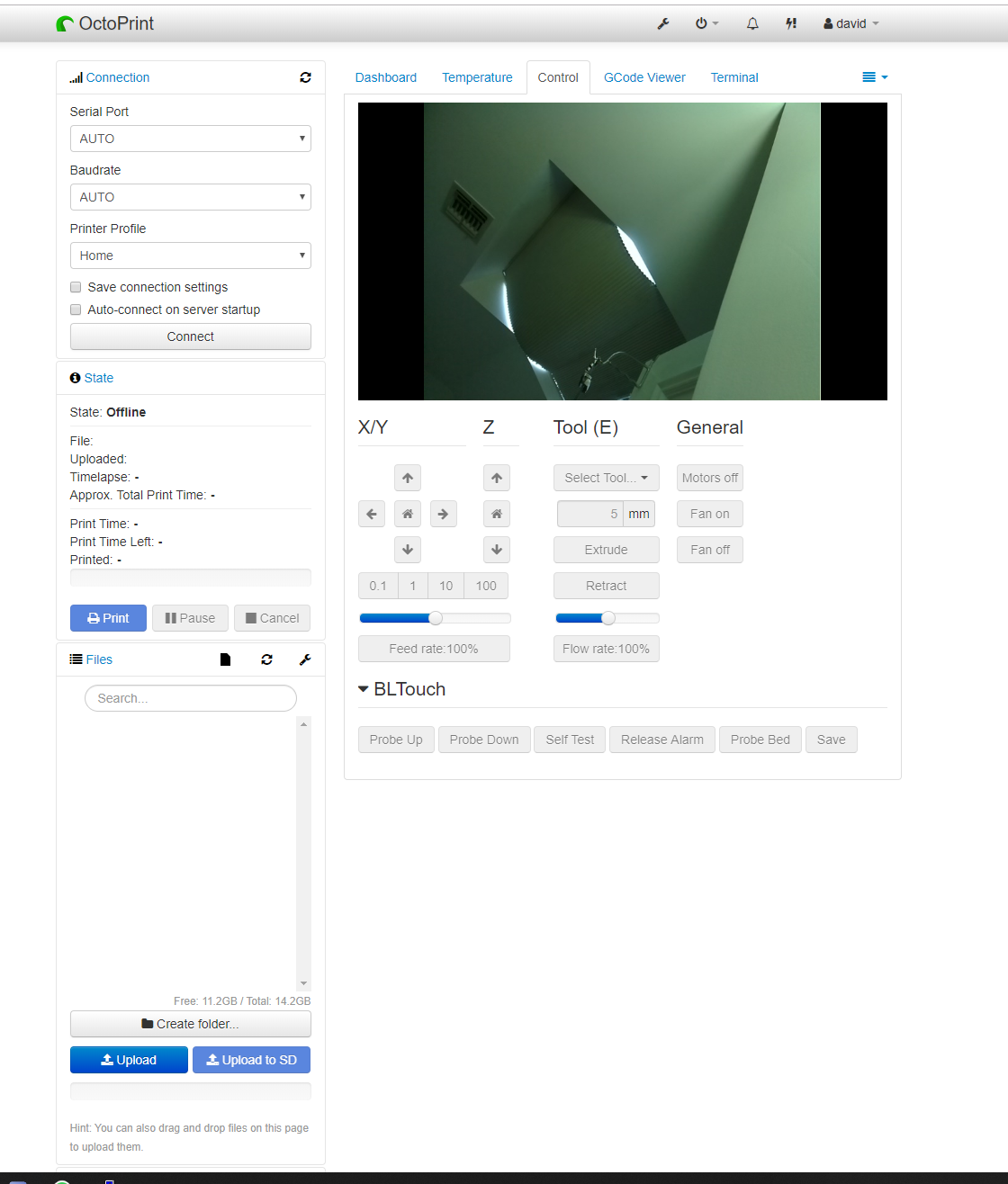
For some reason the camera doesn’t clear its resources when I do “sudo service octoprint stop” Since the camera is only able to handle one program at a time, it wasn’t letting me run the script. There was an unknown application or program taking up that one resource. Even after I stopped octoprint.
I thought it worked, because I was in SSH but I noticed it didn’t actually change the focus. So I plugged it in HDMI and I noticed that it black screened and not focusing the camera.
Step 4: Calibration
4_calibration.py loads all previously saved pairs and figures out the correction matrices. It searches for the chessboard on the photo, and move on if the chessboard is not found. Therefore, the bad photos in the series won’t break the script. After the calculation is finished, it will rectify the last image and show the resulting “fixed” images. You can check the quality of the calibration in this step, which might take 1-2 minutes.
But I am getting the following error:
Traceback (most recent call last):
File “4_calibration.py”, line 29, in <module>
from stereovision.calibration import StereoCalibrator
ImportError: No module named stereovision.calibration
I found the source code and saved it as a .py file in the stereo_depth_demo folder but it still gives the same error. Any suggestions?
You are missing the stereovision dependency, use the “sudo pip3 install stereovision” command to install.
Note: Please use python3 to run the sample program “python3 4_calibration.py”
python3 4_calibration.py
Traceback (most recent call last):
File “4_calibration.py”, line 26, in <module>
import cv2
File “/usr/local/lib/python3.7/dist-packages/cv2/init.py”, line 3, in <module>
from .cv2 import *
ImportError: libjasper.so.1: cannot open shared object file: No such file or directory
Thank you, Wong! That worked. However, the 4_calibration.py ignored all my pairs. My pairs looked like the image above. Do I need to use an exact chessboard color and sequence? What exactly is 4_calibration checking for?

 I advise you disconnect your Octoprint device, run the camera using our python script firstly, then connect your print device to try.
I advise you disconnect your Octoprint device, run the camera using our python script firstly, then connect your print device to try.