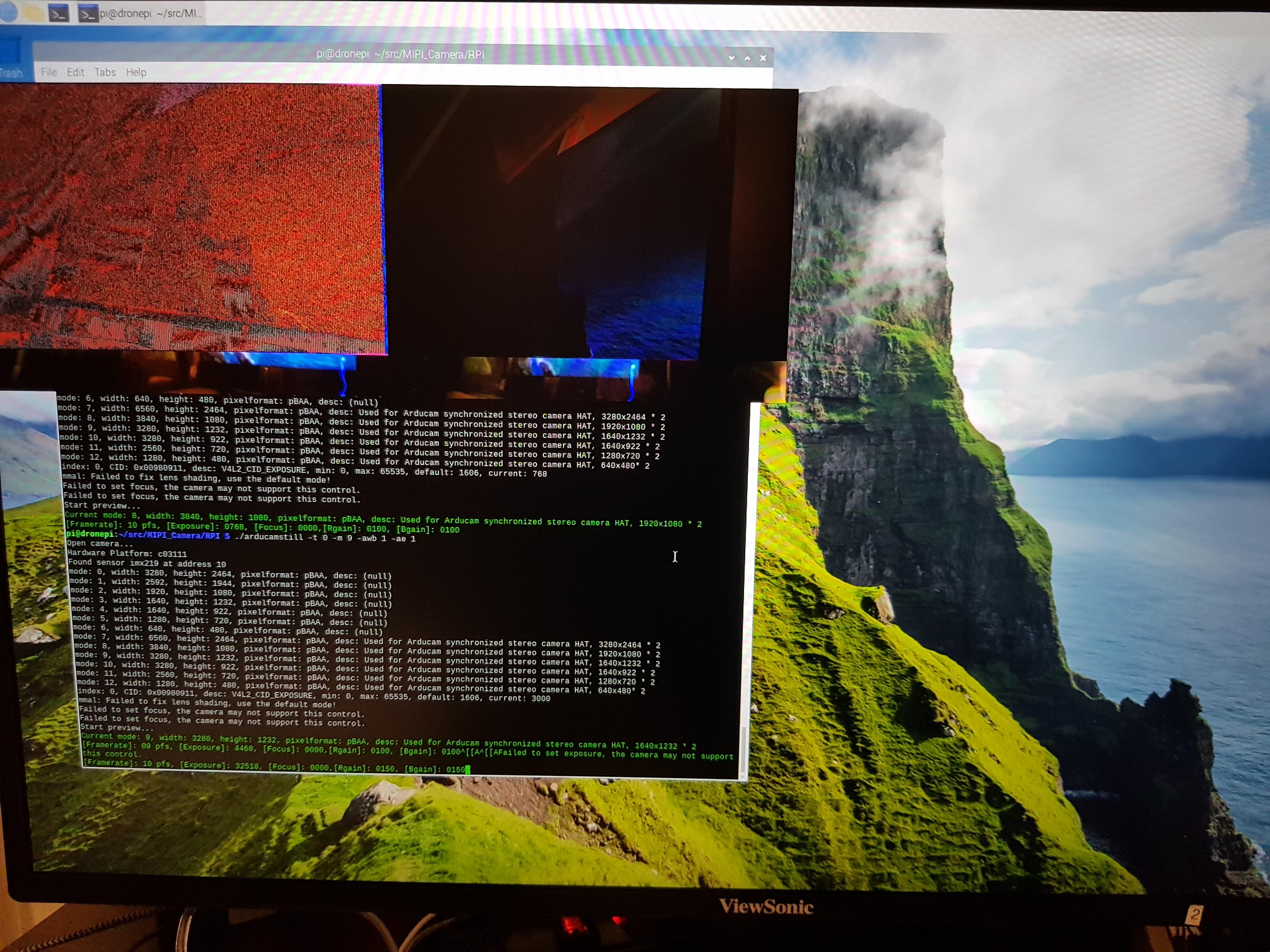
I found that if I hold the button to increase the exposure, the new exposure value ‘sticks’ and the image brightens.
However, when I increased my Rgain and Bgain to 150 and 150, the left camera turned to noise, and the exposure value seemed to be lost (completely dark again).
I’m curious if this is a silicon or software problem?
Recently, we are keeping on working on tuning the quality of the sensor. Due to without the hardware ISP, the original image does not really good. We have updated our sensor configuration. The the future, we will release new product with ISP procession.
When I use following command for setup testing, the images are normal color.
raspistill -t 0 -p 800,100,1024,768
But, When I do the 1_test.py at the “Depth Mapping on Arducam Stereo Camera HAT with OpenCV” , I got all the green images. I don’t know this is the fault h/w or s/w setting, anyway, after next step 2_chess_cycle.py, 3_pairs_cut.py, at 4_calibration.py step could not finished.
I am using the 4 cameras adapter V2.2. It seems like the camera A, B, and C are pretty stable; however, the camera D get darker after 30 seconds of video streaming. I discovered that if I covered one of the cameras in port A, B, or C, camera D started to get brighter again. Is there any way I can improve this?
Also, videos start to show green and noise at 4 minutes of video streaming.
I am facing the same problem. None of above helped. Has anyone did something about this? Is there any solution to this? In case the 8mp stereohat was not designed for video (which I really do not understand) how is one supposed to calibrate it? Thanks for any help.